久しぶりの釣行、タチウオ3匹釣れました。回転式振動子魚探の動作確認も
本日は良い天気で絶好の釣り日和なので、回転式振動子魚探の
動作確認も行いました。
本日より魚探のソナー化の装置名称を機械式回転振動子魚探
略してMRTS (Mechanical Rotary Transducer SONAR )で
統一いたします。
まずタチウオポイントへ

しばらくエンジン動かしていませんでしたが、先日オイル交換
実施していますので快調です。4900回転でそこそこ速いです。

タチウオのポイントに向かいましたが、既に船で一杯です。
とりあえず近づいてタチウオを釣ることに。
当たりはあるものの釣れず。。色々仕掛けを変えてみましたが、
やはりテンヤが一番でした。
船が多くて渋いなか、小さな当たりを見逃さずに合わせを
入れると釣れてきます。

指4本ぐらい。
この後、なんとか指3~4本ぐらいのを3匹確保できました。
魚はGarmin魚探に映るのですが、かなり渋いです。
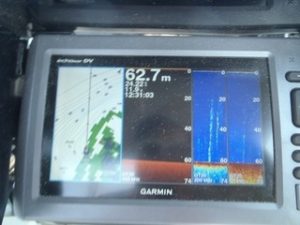
縦長に映っているのは、エサを追って来ているのかな?
タチウオはいるようです。
さて回転式振動子魚探のテストですが、深場だと魚探の
HE6100の性能がいまいちなのか、綺麗に映りません。
浅場に移動してテストをしました。

回転動作は良好です。魚探の方も映っています。
回転速度に受信器も充分追従しているようです。
下向きのため底面が映っています。

振動子が回転しているためか、起伏が大きく映ります。
斜めに探索するせいか、ノイズも多い。
同じ場所でのGarminの魚探映像です。

止まっているためか平坦に移ります。綺麗ですね。
今回魚をMRTSで捕えることはできませんでしたが、
コノシロなど群れが大きい場合は有効だと思います。
次回はコノシロの魚群を捕えてみます。