船外機リモコン電動化の続き、リモコン制御装置が完成しました。
今週は船外機リモコン電動化の続きをご紹介します。
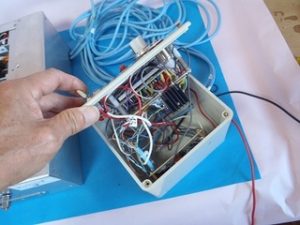
これが完成したリモコン制御装置です。

左側がモータ駆動部分、右側がタイマー制御部分です。
BOXは電源端子箱を利用し、接続はLANケーブルを分解、
BOXは電源端子箱を利用し、接続はLANケーブルを分解、
2本で接続しました。約3Mあります。
モータ駆動線は2対を+、-に使用しています。
タイマー制御部です。

上側の2つのツマミでタイマー可変します。
有合せのツマミのため形が異なっています。
ニュートラル位置と前進位置でタイマーは約3秒から
40秒までそれぞれ可変できます。
途中手動ボタン(緑色タクトSW)でONもできます。
2つ並びのLEDはニュートラル位置(緑)と前進位置(赤)も
LED表示しています。
写真はニュートラル位置が点灯しています。
下側にスロットルの位置(赤がOFF)のLEDが点灯しています。
この点灯がない場合はクラッチ側のモータは駆動しないように
しています。
その他、スロットル側ONSW、タイマーOFFSW、ALLOFF SW
などが付いています。
制御部を分解するとご覧のように線だらけで、自分自身でも
わからなくなってしまいます。
IC配置図、結線図は不可欠です。

図面にかなり修正が入っています。
モータ駆動部分です。

DCモータは大きな電流が流れますので、リレーを使用しました。
また突入電流も大きいので、多少モータ出力は落ちますが、
直列に1Ωの抵抗を挿入しています。
電磁ソレノイドの駆動はトランジスタのダーリントン接続を
使用しています。
動作原理はタイマーICのパルス出力の立上り部分と立下り部分に
ワンショットマルチICでそれぞれ約1秒間のパルスを発生
させて、フォトインタラプタによる船外機位置検出
(ニュートラル、前進)に合わせてモータと電磁ソレノイドを
同時駆動開始し、ニュートラル位置、前進位置のどちらも検出
しなくなると(NORゲートHレベル)引き続きモータを駆動
させるようにし、どちらか一方が位置検出した時点(NORゲート
Lレベル)でモータが停止するようにしています。
また、タイマーICの発信出力パルスのデイユーティ比を
可変抵抗器で変化させて立上りパルスから、立下りパルス
可変抵抗器で変化させて立上りパルスから、立下りパルス
までの時間変更をすることにより、ニュートラル位置の時間、
前進位置の時間を可変することができます。
ロジックICはTTLとCMOSが混在しており、入力電圧が低い場合
不安定動作の原因となり、接続に注意しました。
また、IC近辺の電源とアース間にパスコンデンサを入れて、
誤動作防止をしています。
理論上の動作は良いのですが、実際は負荷がない場合、
モータが停止しても余力で廻りすぎてしまいます。ので、
位置検出位置の幅に余裕を持たせるようにしました。
しかし今度は位置検出幅が長くなったことにより、
最初のモータ駆動時間約1秒間では足りなくなってしまい、
うまく動作できません。急遽半固定可変抵抗器を入れて
時間調整できるようにしました。
かなり作成には苦労しましたが、うまく制御回路は動作
しており、満足しています。
動作の模様は以下ユーチューブに動画で掲載しましたので
ご覧ください。
あとは船外機リモコンケーブルに接続するための、
回転動作を直線動作に変更するメカニカル部分のみ
となりました。完成までもう少しですね。