少し手こずりましたが制御部がほぼ完成しました。
おもな特徴は各部別電源で動作させることができるという
点です。
回路構成図
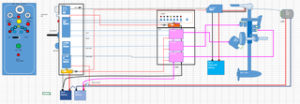
12Vバッテリー3個使用していますが、2個直列24V
で舵制御用モーターとソレノイドを駆動しているのと、
12Vデープサイクルバッテリー(予定)単独でエレキ
モーター本体を駆動させ、それぞれフォトカプラで制御
信号は分離されています。
フォトカプラで分離する事によって、故障しても
波及する影響範囲を小さくできます。
また電源を別々に取れますので接続が容易です。
完成した制御部です。
木箱の中に基板を入れていますが、仕上げはFRP塗装
する予定です。

真ん中に舵を左右に切るレバースイッチ(モーメンタリー
動作)上部にエレキモーター本体の速度制御用PWM
調整ボリューム(大)とその下にTIMER用調整ボリューム
2個(小)付いています。
PWMでの速度制御と、TIMERによるON間隔とOFF間隔
を数秒~数十秒程度まで可変できるようにしました。
PWMとTIMERをANDで組んでいますが、PWMで魚探に
影響が出る場合、TIMERのみ動作させるようにしています。
中はいつもの線だらけです。。
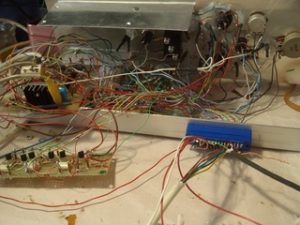
これでもちゃんと接続できていますよ。
全体の回路を接続して動作試験です。

制御用モーター駆動部とセンサー部回路です。

ギアモーターの下側に基板を設置しています。
動作試験でのLED点灯状況です。

LEDは高輝度タイプで少し眩しいくらいですが、船上では
良く見えていいでしようか。
うまく動作しましたので機能はほぼ完成です。
あとは駆動部にFRPによる防滴カバー作成する必要があり、
まだまだ作成は続きます。